
Frameless Torque Motor
BS8413NFL
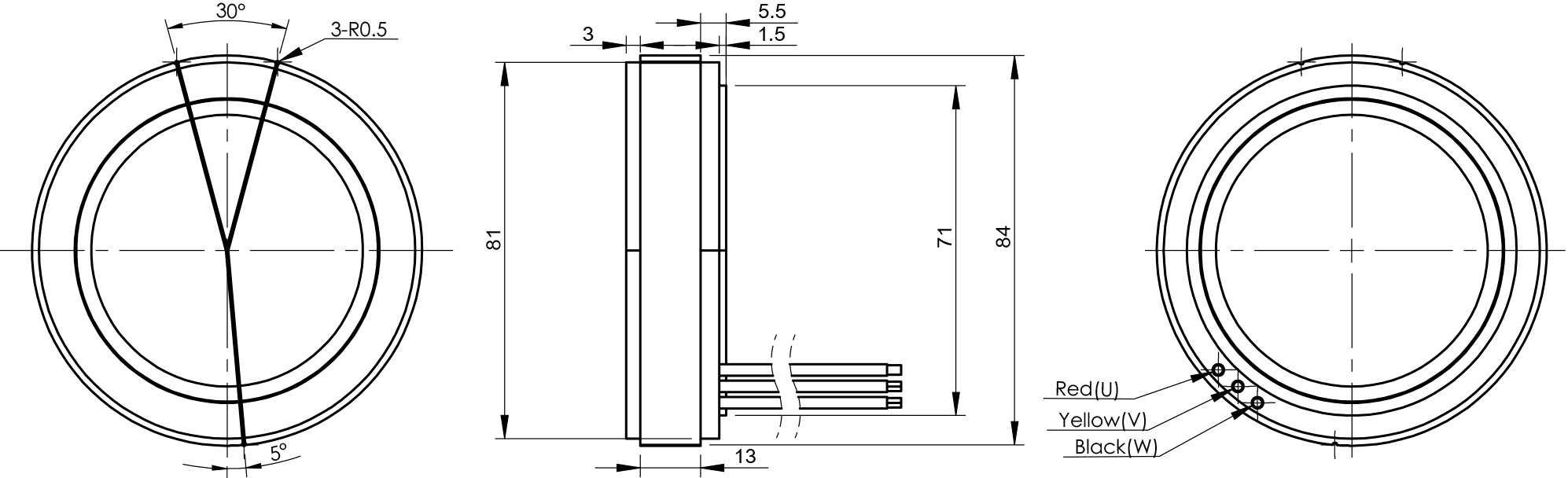
Diameter:84mm Lengh :21.5mm Voltage:48V. Max. output power :510W Speed:3460rpm;Nominal torque:1.4N.m
Applications: Collaborative robots , Mechanical arm , Humanoid robot etc.
Customizable options: Specifications, wire length, performance, gearbox.
Unit price: Quote based on customer quantity and solution requirements
| Characteristics | UNIT | -17-48.0 | -35-48.0 |
| Voltage | V | 48.0 | 48.0 |
| Line resistance | Ω | 1.1 | 0.28 |
| Line inductance | mH | 0.59 | 0.15 |
| No-load speed | rpm | 1730 | 3460 |
| No-load current | A | 0.25 | 0.5 |
| Stall torque | N.m | 11.0 | 22.7 |
| Stall current | A | 43.6 | 174.5 |
| Nominal torque | N.m | 1.40 | 1.40 |
| Nominal speed | rpm | 1370 | 2740 |
| Nominal current | A | 5.2 | 10.2 |
| Max.output power | W | 510 | 2000 |
| Max.efficiency | % | 86 | 86 |
| Back-EMF constant | mV/rpm | 27.6 | 13.8 |
| Torque constant | Nm/A | 0.250 | 0.130 |
| KV Value | rpm/V | 36 | 72.1 |
| Speed/torque gradient | rpm/Nm | 157 | 153 |
| Rotor inertia | gcm2 | 535 | 535 |
| Weight | g | 255 | 255 |

- 0755-27351975
- 407943534
-

- 0755-27351975